Slocum AUGV
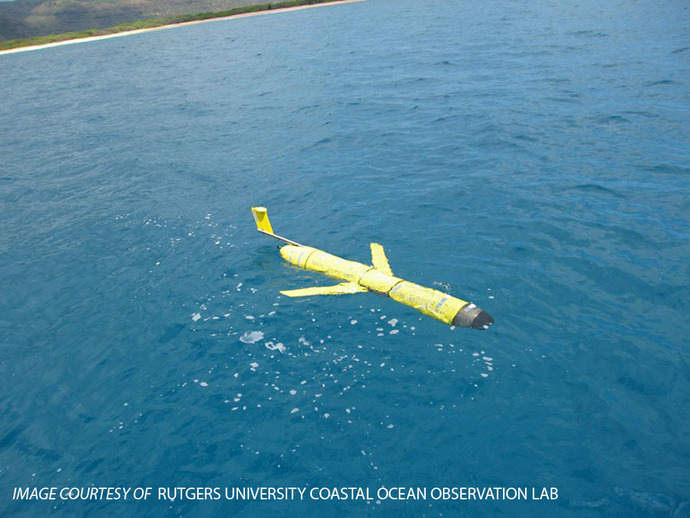
The Slocum autonomous underwater gliding vehicle (AUGV) onboard the VISIONS'11 cruise is part of Rutgers University's fleet of gliders. The AUGV, built by Teledyne Webb Research Corporation, dives and climbs in the water column by changing buoyancy via a ballast engine. The resulting sawtooth pattern this vehicle maneuvers in allows it to operate under very low power requirements. The AUGV travels horizontally at ~0.5 mph and is outfitted with a set of wings and a fin that allow steerable gliding towards configurable waypoints.
The Slocum glider is equipped with two methods of communication with operators: 1) a RF modem is used to 'talk' with the glider from the ship or when the vehicle is not in the water, and 2) an iridium satellite phone inside of the glider allows for two-way communication with computers onshore (or on the ship). When communication is established between the glider and an operator via the iridium phone, the vehicle's current tasks or waypoints can be changed while it is still in the water. This connection also allows for the transfer of live data sets from the glider to scientists.
For more information about the glider onboard, visit the Rutgers University's Coastal Ocean Observation Lab website.